Stepper robot arm
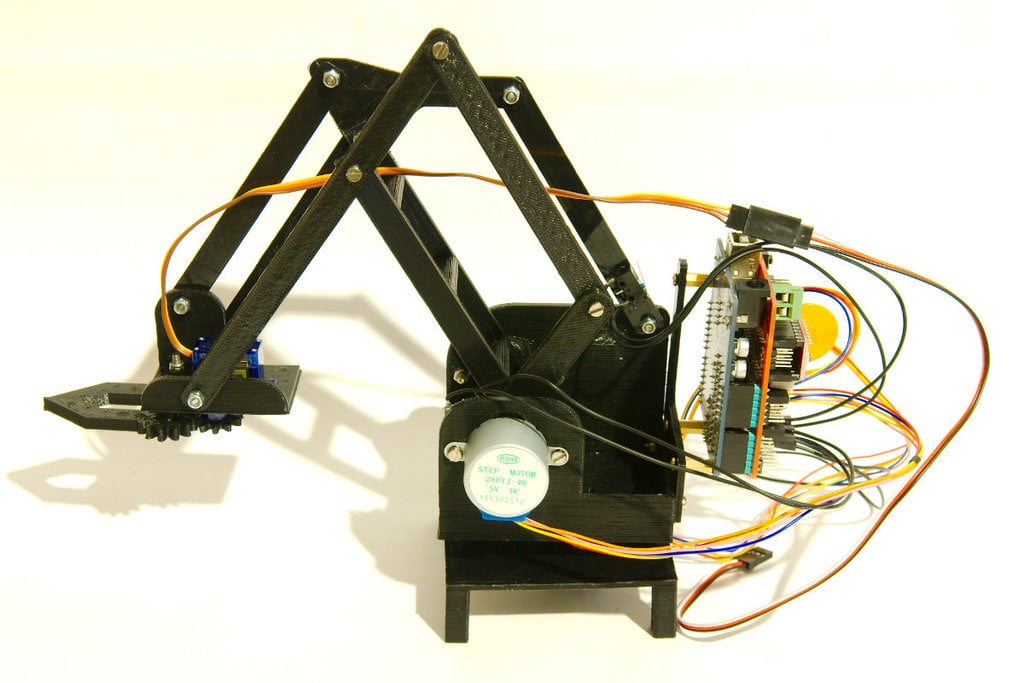
This is a little robot arm inspired by the MeArm. It does not share any parts with the original MeArm. I designed it from scratch using FreeCad. Instead of using 4 hobby servos my arm uses 3 small stepper motors (28BYJ-48 12VDC) and one servo for the gripper. I designed this arm so it would be easier to print then the original MeArm. It consists of 13 different parts, one part has to be printed 4 times.
More info: http://www.bajdi.com/mearm-forked/
Video of the arm in action: https://www.youtube.com/watch?v=TdO51ApYu1U